mapa unicesumar 2025
| MAPA – SISTEMAS REALIMENTADOS – 52_2026 | |
| Período: | 04/05/2026 08:00 a 05/07/2026 23:59 (Horário de Brasília) |
| Status: | ABERTO |
| Nota máxima: | 3,50 |
| Gabarito: | Gabarito não está liberado! |
| Nota obtida: | |
CLIQUE AQUI PARA VER A RESPOSTA
| 1ª QUESTÃO | |||
|
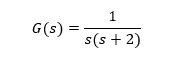
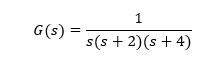
INSTRUÇÕES DE ENTREGA Este é um trabalho INDIVIDUAL. As respostas devem ser entregues utilizando o Modelo de Resposta MAPA disponibilizado. Sobre o seu preenchimento, é necessário o cumprimento das seguintes diretrizes: Não serão aceitas respostas que constem apenas o resultado numérico, sem que seja demonstrado o raciocínio que o levou a encontrar aquela resposta. A qualidade do trabalho será considerada na hora da avaliação, então, preencha tudo com cuidado, explique o que está fazendo, responda às perguntas e mostre sempre o passo a passo das resoluções e deduções. Quanto mais completo seu trabalho, melhor! Problemas frequentes a evitar: Coloque um nome simples no seu arquivo para não se confundir no momento de envio. Como enviar o arquivo: Acesse no Studeo o ambiente da disciplina e clique no botão M.A.P.A. No final da página, há uma caixa tracejada de envio de arquivo. Basta clicar nela e, então, selecionar o arquivo de resposta da sua atividade. Sobre plágio e outras regras: Trabalhos copiados da internet ou de outros alunos serão zerados. A equipe de mediação está à sua disposição para o atendimento das dúvidas por meio do “Fale com o Mediador” em seu Studeo. Aproveite essa ferramenta! ATIVIDADE MAPA 1- Considere um sistema de controle de posição aplicado a um atuador eletromecânico utilizado em processos industriais de alta precisão, como em máquinas CNC, sistemas robóticos ou equipamentos de posicionamento automatizado. Nesses sistemas, é fundamental garantir elevada exatidão, rapidez de resposta e estabilidade, mesmo na presença de perturbações externas e incertezas nos parâmetros do modelo. Devido às características físicas do sistema, como inércia e atrito, o comportamento dinâmico da planta pode ser modelado por G(s):
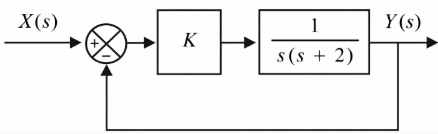
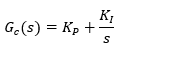
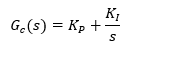
Figura 1 – Sistema de controle de um atuador 2- Considere um sistema de controle aplicado ao ajuste automático de uma variável de processo industrial, como temperatura em fornos, velocidade em motores elétricos ou posição em sistemas de acionamento, no qual o objetivo principal é garantir que a saída Y(s) acompanhe com precisão o sinal de referência U(s), mesmo diante de perturbações externas e incertezas nos parâmetros do sistema. O sistema é composto por blocos dinâmicos interconectados, representando os elementos físicos e de controle presentes na planta. Durante a operação, podem existir perturbações externas que afetam o sistema. No entanto, para fins de análise do comportamento dinâmico nominal, considere que não há influência de distúrbios, ou seja: D(s) = 0 O diagrama de blocos do sistema é apresentado a seguir: A partir do diagrama de blocos fornecido: determine a função de transferência em malha fechada, obtenha o polinômio característico do sistema e verifique se o sistema é estável utilizando o critério de Routh-Hurwitz. 3- Em sistemas de controle realimentados, o desempenho dinâmico pode ser analisado a partir de dois aspectos fundamentais: o regime transitório, que descreve a evolução da resposta desde a aplicação da entrada até a estabilização, e o regime permanente, que caracteriza o comportamento do sistema após o desaparecimento dos efeitos transitórios. A avaliação desses regimes é essencial para verificar se o sistema atende a requisitos de desempenho, como tempo de subida, tempo de acomodação, sobressinal e erro em regime permanente. Nesse contexto, o uso de controladores, como o PID (Proporcional-Integral-Derivativo), desempenha papel central no ajuste da resposta do sistema em malha fechada. Considerando o contexto discutido anteriormente, explique o papel da ação integral em um sistema de controle, discutindo: como ela atua na redução do erro em regime permanente; quais são os possíveis efeitos da ação integral sobre o regime transitório; e quais cuidados devem ser tomados ao aumentar o ganho integral durante a sintonia do controlador. Demonstre, a partir da função de transferência de um controlador PI, como a presença do termo integral afeta o erro em regime permanente para uma entrada degrau.
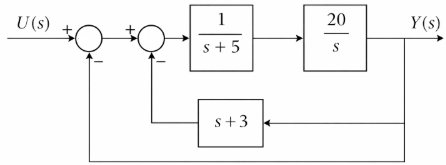
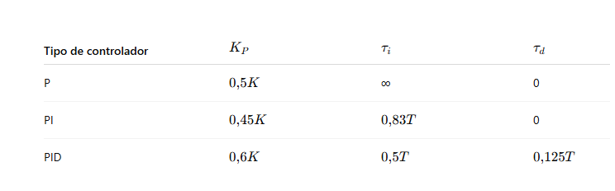
4- Em sistemas de comunicação e controle, é fundamental compreender como circuitos e sistemas dinâmicos respondem a sinais de diferentes frequências, uma vez que muitos fenômenos relevantes, como ruídos, distorções e limitações físicas, estão diretamente relacionados ao domínio da frequência. Nesse cenário, o uso do diagrama de Bode se destaca como uma ferramenta essencial para a análise e o projeto de sistemas lineares invariantes no tempo. Considere que determinado sistema eletrônico pode ser modelado pela seguinte função de transferência: G(s) = (10(s + 10))/(s(s + 100. Esse sistema representa, por exemplo, um estágio de condicionamento de sinal com comportamento dependente da frequência. Dessa forma, deve-se colocar a função de transferência na forma padrão para análise em frequência; identificar os polos e zeros do sistema; traçar o diagrama de Bode da magnitude (em dB), utilizando aproximações assintóticas, indicando inclinação em cada faixa de frequência e valores aproximados nos pontos de transição. 5- O ajuste de controladores do tipo PID envolve a definição apropriada dos parâmetros associados às ações proporcional, integral e derivativa, com o objetivo de garantir desempenho adequado do sistema em malha fechada. Dentre os métodos clássicos de sintonia, destaca-se o proposto por John G. Ziegler e Nathaniel B. Nichols, que se baseia na análise do comportamento do sistema quando submetido a um controle puramente proporcional. Nesse método, determina-se um ganho crítico para o qual o sistema passa a apresentar oscilações sustentadas, caracterizadas por um período. A partir desses parâmetros, são estabelecidas relações empíricas para a obtenção dos ganhos do controlador.
Considere um sistema de controle que apresente a característica a seguir: ganho: 20; polos: +j2; -2j; amortecimento: 0; percentual de sobressinal: 100%; e frequência: 0,32Hz. Com base nas informações e no contexto apresentado: 6- Considere um sistema de controle em malha fechada com realimentação unitária e negativa, amplamente utilizado em aplicações industriais e sistemas automatizados devido à sua capacidade de corrigir erros e melhorar o desempenho global do sistema. Nesse tipo de configuração, a saída do sistema é continuamente medida e comparada com um sinal de referência, gerando um erro que é utilizado pelo controlador para ajustar a ação de controle aplicada à planta, conforme ilustrado na Figura 3. O controlador PD da Figura 3 possui as seguintes características: a constante derivativa é KD = 1; a constante proporcional é 300% maior que a derivativa. A planta do sistema é dada por:
Considere a Figura 3: Dessa forma, levando em consideração as características apresentadas no contexto: |
|||
| ALTERNATIVAS | |||
|